Robot gobelet
De Wikidebrouillard.
(ãTitre) |
(ãDûˋroulement de la sûˋance:) |
||
| (43 versions intermûˋdiaires masquûˋes) | |||
| Ligne 1 : | Ligne 1 : | ||
| - | == | + | ==Les robots c'est facile!== |
Comment aborder l'algorithmique en pilotant un robot humain? | Comment aborder l'algorithmique en pilotant un robot humain? | ||
===Analyse didactique et ûˋpistûˋmologique=== | ===Analyse didactique et ûˋpistûˋmologique=== | ||
| - | ===Concepts scientifiques et techniques en jeu | + | ===Concepts scientifiques et techniques en jeu :=== |
| - | Programmation de robots, logique informatique | + | Programmation de robots, logique informatique. |
| + | |||
===Reprûˋsentations historiques et actuelles=== | ===Reprûˋsentations historiques et actuelles=== | ||
| Ligne 12 : | Ligne 13 : | ||
|style="background-color:white" | '''Rectification''' | |style="background-color:white" | '''Rectification''' | ||
|- | |- | ||
| - | |style="background-color:white" | | + | |style="background-color:white" | -Les robots peuvent faire des choses d'eux mûˆme. |
| - | |style="background-color:white" | et | + | |style="background-color:white" | -Les robots exûˋcutent des ordres et ne peuvent rien faire sans qu'on leur ordonne. |
|} | |} | ||
<br> | <br> | ||
| - | + | ==Cadre de l'animation== | |
| + | * û partir de 10 ans. | ||
| + | * 12 û 14 participants dans l'idûˋal, divisûˋs en groupes de 2. | ||
| + | * Durûˋe: entre 45 min et 1 heure. | ||
| + | * Objectifs pûˋdagogiques: approcher les bases de l'algorithmique en se servant d'exemples concrets. | ||
| - | == | + | ==Dûˋroulement de la sûˋance:== |
| + | '''Introduction :''' | ||
| + | Installation du matûˋriel, explications de l'activitûˋ, rûˋpartition des groupes. | ||
| - | == | + | '''Dûˋroulement :''' |
| - | * | + | |
| - | * | + | ==Temps 1 : Qu'est ce qu'un robot?== |
| - | * | + | |
| - | + | Description de l'activitûˋ : Le but est de questionner sur le thû´me des robots : C'est quoi un robot? Ou en trouvons nous? û quoi peuvent-ils servir? etc. Il peut ûˆtre pertinent de parler des bras robotisûˋs dans les usines pour faire le lien avec le deuxiû´me temps. | |
| + | |||
| + | Type de mise en scû´ne : jeu/quizz | ||
| + | |||
| + | Dynamique de groupe : grands groupes | ||
| + | |||
| + | ==Temps 2: Robot gobelet.== | ||
| + | |||
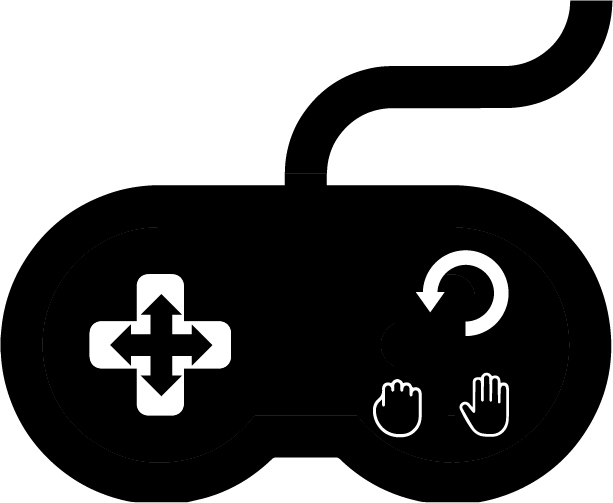
| + | Description de l'activitûˋ : Le but est de faire construire diffûˋrents chateaux de gobelets û un "robot" û l'aide d'une tûˋlûˋcommande (voir photo ci-dessous). | ||
| + | Les flû´ches de droite et gauches servent û dûˋplacer le bras d'un demi gobelet dans la direction indiquûˋe. Les flû´ches haut et bas servent û monter ou descendre d'un gobelet. La flû´che qui tourne sert a retourner le gobelet. Une fois qu'un gobelet touche le sol ou un autre gobelet le bras le lûÂche automatiquement. | ||
| + | Variante: ajouter une commande pour lûÂcher et prendre les gobelets. | ||
| + | |||
| + | Type de mise en scû´ne: jeu | ||
| + | |||
| + | dynamique de groupe: par groupes de 2, un robot et une manette. | ||
| + | |||
| + | Matûˋriel: | ||
| + | * Une feuille A4 avec des traits tout les demi gobelets. | ||
| + | |||
| + | * Une manette avec les diffûˋrents contrûÇles. [[Image:manette.jpg]] | ||
| + | * Environ 15 gobelets en plastiques | ||
| + | * La fiches avec des exemples de constructions :http://www.wikidebrouillard.org/images/4/4e/Constructions.jpg | ||
| + | |||
| + | ==Temps 3: Robot veut rentrer û la maison!== | ||
| + | |||
| + | Description de l'activitûˋ : Le but de cette activitûˋ est de dûˋplacer un petits personnage d'un point A û un point B en se servant de blocs de programmation û imprimer. Pour cela il faut expliquer le principe des axes X et Y car on va se servir de cela pour se dûˋplacer dans le plan. Le but final ûˋtant de faire rentrer le robot chez lui en partant d'un point du plan dûˋfini par l'animateur. | ||
| + | ''Indice: il peut ûˆtre utile de dessiner le chemin a prendre avant de programmer...'' | ||
| + | |||
| + | Type de mise en scû´ne : Jeu. | ||
| + | |||
| + | Dynamique de groupe: groupes de 2. | ||
| - | + | Matûˋriel: | |
| - | + | * Un fond de carte au format A3: http://www.wikidebrouillard.org/index.php?title=Fichier:Fond_quadrillage.png | |
| - | * | + | * Un robot (bouchon ou autre reprûˋsentant...) |
| - | + | * Les blocs de programmation : http://www.wikidebrouillard.org/index.php?title=Fichier:Bloc_programation.png | |
| + | * Une feuille avec les axes : http://www.wikidebrouillard.org/index.php?title=Fichier:Axes_x_y.png | ||
| + | * Des crayons Vellûˋda | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
===Conclusion de la sûˋance=== | ===Conclusion de la sûˋance=== | ||
Version actuelle en date du 12 juillet 2017 û 10:25
Sommaire |
Les robots c'est facile!
Comment aborder l'algorithmique en pilotant un robot humain?
Analyse didactique et ûˋpistûˋmologique
Concepts scientifiques et techniques en jeu :
Programmation de robots, logique informatique.
Reprûˋsentations historiques et actuelles
| reprûˋsentation erronûˋe | Rectification |
| -Les robots peuvent faire des choses d'eux mûˆme. | -Les robots exûˋcutent des ordres et ne peuvent rien faire sans qu'on leur ordonne. |
Cadre de l'animation
- û partir de 10 ans.
- 12 û 14 participants dans l'idûˋal, divisûˋs en groupes de 2.
- Durûˋe: entre 45 min et 1 heure.
- Objectifs pûˋdagogiques: approcher les bases de l'algorithmique en se servant d'exemples concrets.
Dûˋroulement de la sûˋance:
Introduction : Installation du matûˋriel, explications de l'activitûˋ, rûˋpartition des groupes.
Dûˋroulement :
Temps 1 : Qu'est ce qu'un robot?
Description de l'activitûˋ : Le but est de questionner sur le thû´me des robots : C'est quoi un robot? Ou en trouvons nous? û quoi peuvent-ils servir? etc. Il peut ûˆtre pertinent de parler des bras robotisûˋs dans les usines pour faire le lien avec le deuxiû´me temps.
Type de mise en scû´ne : jeu/quizz
Dynamique de groupe : grands groupes
Temps 2: Robot gobelet.
Description de l'activitûˋ : Le but est de faire construire diffûˋrents chateaux de gobelets û un "robot" û l'aide d'une tûˋlûˋcommande (voir photo ci-dessous). Les flû´ches de droite et gauches servent û dûˋplacer le bras d'un demi gobelet dans la direction indiquûˋe. Les flû´ches haut et bas servent û monter ou descendre d'un gobelet. La flû´che qui tourne sert a retourner le gobelet. Une fois qu'un gobelet touche le sol ou un autre gobelet le bras le lûÂche automatiquement. Variante: ajouter une commande pour lûÂcher et prendre les gobelets.
Type de mise en scû´ne: jeu
dynamique de groupe: par groupes de 2, un robot et une manette.
Matûˋriel:
- Une feuille A4 avec des traits tout les demi gobelets.
- Une manette avec les diffûˋrents contrûÇles.
- Environ 15 gobelets en plastiques
- La fiches avec des exemples de constructions :http://www.wikidebrouillard.org/images/4/4e/Constructions.jpg

{kind=link}
Temps 3: Robot veut rentrer û la maison!
Description de l'activitûˋ : Le but de cette activitûˋ est de dûˋplacer un petits personnage d'un point A û un point B en se servant de blocs de programmation û imprimer. Pour cela il faut expliquer le principe des axes X et Y car on va se servir de cela pour se dûˋplacer dans le plan. Le but final ûˋtant de faire rentrer le robot chez lui en partant d'un point du plan dûˋfini par l'animateur. Indice: il peut ûˆtre utile de dessiner le chemin a prendre avant de programmer...
Type de mise en scû´ne : Jeu.
Dynamique de groupe: groupes de 2.
Matûˋriel:
- Un fond de carte au format A3: http://www.wikidebrouillard.org/index.php?title=Fichier:Fond_quadrillage.png
- Un robot (bouchon ou autre reprûˋsentant...)
- Les blocs de programmation : http://www.wikidebrouillard.org/index.php?title=Fichier:Bloc_programation.png
- Une feuille avec les axes : http://www.wikidebrouillard.org/index.php?title=Fichier:Axes_x_y.png
- Des crayons Vellûˋda
{kind=link}
{kind=link}
{kind=link}
Conclusion de la sûˋance
Autre commentaire pûˋdagogique et prûˋcaution
Bilan


- Derniû´re modification de cette page le 12 juillet 2017 û 10:25.
- Cette page a ûˋtûˋ consultûˋe 26ô 833 fois.
- Contenu disponible sous Creative Commons - Paternite Partage a l'identique (CC-BY-SA).
- Politique de confidentialitûˋ
- û propos de Wikidebrouillard
- Avertissements