Grove : GPS
De Wikidebrouillard.
| (2 versions intermédiaires masquées) | |||
| Ligne 64 : | Ligne 64 : | ||
SoftwareSerial SoftSerial(2, 3); | SoftwareSerial SoftSerial(2, 3); | ||
| - | unsigned char buffer[64]; // Tableau de mémoire tampon (buffer array) pour les données reçues par le port série | + | unsigned char buffer[64]; |
| - | int count=0; | + | // Tableau de mémoire tampon (buffer array) pour les données reçues par le port série |
| + | int count=0; // compteur pour le buffer array | ||
void setup() | void setup() | ||
{ | { | ||
| - | SoftSerial.begin(9600); | + | SoftSerial.begin(9600); // initialisation du débit en bauds du SoftwareSerial à 9 600 bauds |
| - | Serial.begin(9600); | + | Serial.begin(9600); // initialisation du débit en bauds du port série d'Arduino à 9 600 bauds. |
} | } | ||
| Ligne 75 : | Ligne 76 : | ||
void loop() | void loop() | ||
{ | { | ||
| - | if (SoftSerial.available()) | + | if (SoftSerial.available()) // si les données sortent du port série du SoftwareSerial |
| + | ==> les données sortent du shield du SoftwareSerial | ||
{ | { | ||
| - | while(SoftSerial.available()) | + | while(SoftSerial.available()) // lecture des données dans le tableau de caractères (char array) |
{ | { | ||
| - | buffer[count++]=SoftSerial.read(); | + | buffer[count++]=SoftSerial.read(); //écriture des données dans l'array |
if(count == 64)break; | if(count == 64)break; | ||
} | } | ||
| - | Serial.write(buffer,count); | + | Serial.write(buffer,count); // s'il n'y a pas de données, la transmission s'arrête. |
| - | clearBufferArray(); | + | Transférer les données du buffer dans le port série du composant. |
| - | count = 0; | + | clearBufferArray(); // faire appel à la fonction clearBufferArray |
| + | pour effacer les données stockées dans le buffer array | ||
| + | count = 0; //mettre le compteur de la boucle de moment à zéro | ||
} | } | ||
| - | if (Serial.available()) | + | if (Serial.available()) // si des données sont disponibles sur le port série du composant |
| - | SoftSerial.write(Serial.read()); | + | ==> les données sortent de l'ordinateur fixe ou de l'ordinateur portable |
| + | SoftSerial.write(Serial.read()); // inscrire les données sur le shield du SoftwareSerial | ||
} | } | ||
| - | void clearBufferArray() | + | void clearBufferArray() // fonction pour effacer le buffer array |
{ | { | ||
for (int i=0; i<count;i++) | for (int i=0; i<count;i++) | ||
| - | { buffer[i]=NULL;} | + | { buffer[i]=NULL;} // effacer tous les index d'array avec la commande NULL |
}</pre> | }</pre> | ||
*Installer [http://www.u-blox.com/images/Support/Support_Products/EvaluationSoftware/u-centersetup-6.2.0.0.zip U-Blox u-center]. Télécharger le code ci-dessous dans l'interface arduino/seeeduino puis ouvrir le u-center. | *Installer [http://www.u-blox.com/images/Support/Support_Products/EvaluationSoftware/u-centersetup-6.2.0.0.zip U-Blox u-center]. Télécharger le code ci-dessous dans l'interface arduino/seeeduino puis ouvrir le u-center. | ||
| Ligne 147 : | Ligne 152 : | ||
[[Catégorie:technique]] | [[Catégorie:technique]] | ||
[[Catégorie:électrokids]] | [[Catégorie:électrokids]] | ||
| - | + | [[Catégorie:traduire]] | |
[[Catégorie:grove]] | [[Catégorie:grove]] | ||
| + | [[Catégorie:Composant électronique]] | ||
Version actuelle en date du 6 mars 2016 à 11:05
Sommaire |
Introduction
Ce module GPS Grove est un gadget peu coûteux et programmable équipé d'un récepteur GPS "E-1612-UB" compatible avec le protocole U-blox 6, configuré pour une communication série. Il comporte un moteur de positionnement U-blox 5 à 50 canaux dont la mise au point requiert moins d'une seconde. La sensibilité d'acquisition et de suivi peut aller jusqu'à - 160 dBm. Il s'agit donc d'un module d'un excellent rapport qualité/prix, tout à fait adapté à des projets individuels de navigation ou de localisation.
Modèle : SEN10752P

Caractéristiques
- Interface compatible Grove
- Compatible avec les protocoles NMEA et U-Blox 6
- Faible consommation d'énergie
- Débit en bauds configurable
Caractéristiques techniques
| Élément | Min | Typique | Max | Unité |
|---|---|---|---|---|
| Tension | 4,75 | 5,0 | 5,25 | VDC |
| Sensibilité | -160 | dBm | ||
| Débit en bauds | 4 800 | - | 57 600 | Baud |
| Température de fonctionnement | - 40 | - | 85 | °C |
Suggestions d'utilisation
- Localiser et suivre un objet
- Navigation
Utilisation
Ce module permet de lire les informations du GPS via une communication série logicielle (SoftwareSerial) et de les renvoyer vers le port série.
- Connecter le GPS Grove au port entrée/sortie numérique 2 du shield Grove de base à l'aide d'un câble Grove Universal 4 pins.
- Télécharger le code ci-dessous. Si vous ne savez pas comment faire, cliquez ici.
//lien entre l'ordinateur et le shield du SoftwareSerial
//9600 bps 8-N-1 (port série à 9600 bps, 8 bits de données, sans parité et avec 1 bit de stop)
//L'ordinateur est connecté au composant UART
//Le shield du SoftwareSerial est connecté au logiciel UART:D2&D3
#include <SoftwareSerial.h>
SoftwareSerial SoftSerial(2, 3);
unsigned char buffer[64];
// Tableau de mémoire tampon (buffer array) pour les données reçues par le port série
int count=0; // compteur pour le buffer array
void setup()
{
SoftSerial.begin(9600); // initialisation du débit en bauds du SoftwareSerial à 9 600 bauds
Serial.begin(9600); // initialisation du débit en bauds du port série d'Arduino à 9 600 bauds.
}
void loop()
{
if (SoftSerial.available()) // si les données sortent du port série du SoftwareSerial
==> les données sortent du shield du SoftwareSerial
{
while(SoftSerial.available()) // lecture des données dans le tableau de caractères (char array)
{
buffer[count++]=SoftSerial.read(); //écriture des données dans l'array
if(count == 64)break;
}
Serial.write(buffer,count); // s'il n'y a pas de données, la transmission s'arrête.
Transférer les données du buffer dans le port série du composant.
clearBufferArray(); // faire appel à la fonction clearBufferArray
pour effacer les données stockées dans le buffer array
count = 0; //mettre le compteur de la boucle de moment à zéro
}
if (Serial.available()) // si des données sont disponibles sur le port série du composant
==> les données sortent de l'ordinateur fixe ou de l'ordinateur portable
SoftSerial.write(Serial.read()); // inscrire les données sur le shield du SoftwareSerial
}
void clearBufferArray() // fonction pour effacer le buffer array
{
for (int i=0; i<count;i++)
{ buffer[i]=NULL;} // effacer tous les index d'array avec la commande NULL
}
- Installer U-Blox u-center. Télécharger le code ci-dessous dans l'interface arduino/seeeduino puis ouvrir le u-center.
- 1) Cliquer sur Receiver -> Port. Sélectionner le port COM utilisé par Arduino.
- 2) Cliquer sur Receiver -> Baudrate. Vérifier que la valeur 9 600 est bien sélectionnée.
- 3) Cliquer sur View -> Text Console. Ouverture d'une fenêtre affichant les données NMEA.
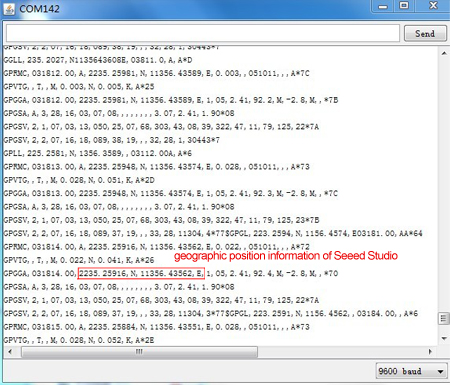
- 4) Ouvrir le moniteur série pour voir apparaître la fenêtre ci-dessous:

- Pour voir les données dans Google Earth:
- 1) Cliquer sur File -> Database Export -> Google Earth KML
- 2) Google Earth se lance en intégrant l'historique des données enregistré par le u-center.
- 3) Sinon, les données peuvent être enregistrées en cliquant sur le rond rouge de la barre d'outils (il vous sera demandé d'indiquer l'emplacement de la sauvegarde).
- 4) Quand vous avez enregistré suffisamment de données, cliquer sur le carré noir pour arrêter l'enregistrement.
- 5) Vous pouvez ensuite convertir le fichier généré .ubx en KML en téléchargeant le fichier .ubx dans GPSVisualizer
Suivis des versions
| Révision | Description | Publication |
|---|---|---|
| v0.9b | Première publication | 3 octobre 2011 |
Ressources
- GPS Eagle File
- GPS Schematic(PDF)
- E-1612-UB Datasheet
- U-Blox6 Receiver Description Protocol Spec
- U-Blox u-center GPS evaluation software
Aller plus loin
Si vous avez des questions ou des suggestions d'amélioration rendez-vous sur notre forum, ou sur notre plateforme wish pour nous en faire part.
Crédits
Cette page est la traduction de celle-ci : http://www.seeedstudio.com/wiki/Grove_-_GPS
Traducteurs : Jessica Pagazani et Salomé Moreau - 2013 dans le cadre du Master 2 rédacteur traducteur 2013


- Dernière modification de cette page le 6 mars 2016 à 11:05.
- Cette page a été consultée 18 979 fois.
- Contenu disponible sous Creative Commons - Paternite Partage a l'identique (CC-BY-SA).
- Politique de confidentialité
- À propos de Wikidebrouillard
- Avertissements