Caméra à suivi IR
De Wikidebrouillard.
(→Logiciel) |
(→Logiciel) |
||
| Ligne 71 : | Ligne 71 : | ||
Ainsi nous donnons la possibilité de contrôleur le servo-moteur par la liaison série. | Ainsi nous donnons la possibilité de contrôleur le servo-moteur par la liaison série. | ||
| + | |||
| + | |||
<u>Code Arduino</u> | <u>Code Arduino</u> | ||
Version du 14 janvier 2014 à 15:27
Sommaire |
Présentation du projet Arduino
Objectif : Caméra de conférence, suivant un orateur automatiquement. Une caméra, montée sur un support rotatif motorisé, suit une DEL infra-rouge portée par l'orateur.
Liste du matériel
-
 Un servo-moteur
Un servo-moteur

-
 La carte Arduino Uno
La carte Arduino Uno
-
 Le logiciel Arduino
Le logiciel Arduino
-
 Du fil électrique (noir, rouge…)
Du fil électrique (noir, rouge…)
-
 Un ordinateur pour programmer
Un ordinateur pour programmer
-
 Une diode infra-rouge comme marqueur
Une diode infra-rouge comme marqueur
-
 Une caméra USB
Une caméra USB
-
 Une wiimote pour capter l'infra-rouge
Une wiimote pour capter l'infra-rouge
- Du carton
- Du scotch
Réalisation du projet
Caméra de conférence, suivant un orateur automatiquement.
Mécanique
Un capteur infra-rouge et la caméra destinée au film sont montées sur un même axe vertical, posées sur un plateau.
Le plateau peut tourner à l'horizontal, motorisé par un servo-moteur.
Celui-ci est contrôlé par la carte Arduino.
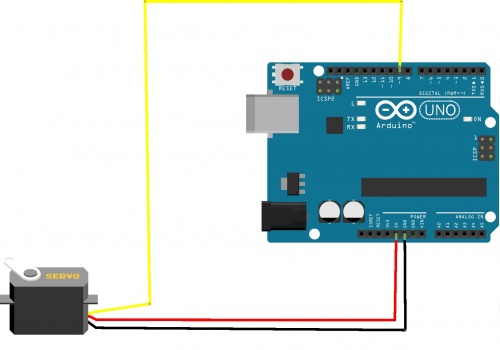
Le Schéma:
Le câblage du servo-moteur est simple:
- Le fil noir sur la masse ( GND )
- Le fil rouge sur le 5 volt de l'Arduino
- Le fil jaune de commande sur la sortie PWM 9

Logiciel
L'image du capteur infra-rouge est interprétée sur un PC : Le programme recherche à l'image la diode infra-rouge, et commande le moteur pour la centrer horizontalement.
Le logiciel utilisé peut se télécharger avec ce lien
Dans ce logiciel, il faut renseigner le code suivant, qui correspond au code Arduino du projet.
Le fichier est découpé en trois partie:
- Les fonctions setup et loop propre à arduino qui permettent dans ce projet de mettre en place la liaison série USB ainsi que d'attacher le servo-moteur au pin 9 de l'arduino. La fonction loop est dédiée à la réception et l'interprétation de message reçut depuis le port série.
- Une deuxième partie qui gère l'envoie et la réception des messages grâce à la liaison série.
- Une troisième partie qui permet la commande du servo-Moteur
Ainsi nous donnons la possibilité de contrôleur le servo-moteur par la liaison série.
Code Arduino
#include <Servo.h>
//Permet d'attendre que le servomoteur finisse sont mouvement
#define TEMPS 550
//On créer un objet servo pour controler le servomoteur
Servo myservo;
void setup()
{
//On initialise la liaison série
Serial.begin(9600);
//On attache le pin 9 au servomorteur
myservo.attach(9);
//On met le servomoteur à 90° par défault
reset90();
}
void loop()
{
//Si il y a une connexion série
if(Serial.available())
{
//On recoit la trame
String recu = recevoir();
//On détermine la commande
String commande = recu.substring(0,3);
//On détermine le paramètre
String parametre = recu.substring(3);
//Si la commande est ADD
if(commande == "ADD")
{
//On récupère le paramètre
int par = parametre.toInt();
//On ajoute l'angle passé en paramètre
add(par);
}
//Si la commande est SUB
else if(commande == "SUB")
{
//On récupère le paramètre
int par = parametre.toInt();
//On soustrait l'angle passé en paramètre
sub(par);
}
//Si la commande est SET
else if(commande == "SET")
{
//On récupère le paramètre
int par = parametre.toInt();
//On impose l'angle passé en paramètre
set(par);
}
//Si la commande est GET
else if(commande == "GET")
{
//On envoi l'angle du servo moteur
envoyer(String(getAngle()));
}
}
}
///// Partie Liaison série
//Fonction qui permet de recevoir des string
String recevoir()
{
//On créer la chaine de charactère pour recevoir un message
char test[20];
//On recois le message
int recus = Serial.readBytesUntil('\n', test, 20);
//On convertit le tableau en string et on la retourne
return String(test);
}
//Fonction qui permet d'envoyer des string
void envoyer(String env)
{
//On envoie le message
Serial.println(env);
}
///// Partie commande servoMoteur
// pour avoir la position actuelle
int getAngle()
{
return myservo.read(); // myservo.read() renvoit l'angle du servo.
}
// fonction set
int set(int angle)
{ // qui prend en paramètre d'entrée l'angle, et qui met le servo à cette angle.
myservo.write(angle);
delay(TEMPS / (181 - (angle)));
}
//fonction add
int add(int angle)
{
if((myservo.read()+angle) >= 172)
set(172);// valeur de butée pour ne pas forcer sur le moteur.
else
set(angle+myservo.read());
}
//fonction sub
int sub(int angle)
{
if((myservo.read()-angle) < 0)
set(0); // on fixe l'angle à 0.
else
set(myservo.read()-angle);
}
//fonction reset90
int reset90()
{
set(90);
}
//fonction reset0
int reset0()
{
set(0);
}
//fonction reset180
int reset180()
{
set(180);
}
Code python
Ce scripte Python utilise la Wiimote pour détecter la led IR, la Wiimote dispose d'une caméra IR d'une résolution de 1024*768 et renvois les coordonnées de jusqu'à 4 points. Tout d'abord on passe la Wiimote en mode synchronisation en pressant simultanément les bouton 1 et 2 puis on lance le scripte, la Wiimote se connecte alors en Bluetooth. Lors de l’exécution du scripte, celui-ci récupère les coordonnée de tous les points détectés, moyenne ces dernières puis agis en conséquent : si le point moyen est sur le tiers gauche, on dit au cervo de tourner dans la direction adéquate, et si le point est dans la zone droite le cervo tourne dans le sens inverse.
#encoding:utf-8
import serial #port serie afin d'envoyer les instructions a l'arduino
import cwiid #libraire pour la wiimote
import time
ser = serial.Serial("/dev/ttyACM0")
WIDTH=1024 #largeur de la camera de la wiimote
WIIMOTE_MAC = "E0:0C:7F:88:99:F9" #code de la wiimote
print("We are now pairing the wii remote, please, presse 1 and 2 button...")
try:
wm = cwiid.Wiimote(WIIMOTE_MAC) #on apaire la wiimote
except RuntimeError: #en cas d'échec un message est affiché
print("Error will pairing wii remote, is blutooth on ?")
quit() #et on quit
else:
print("Pairing succes")
wm.led = 5
wm.rpt_mode = cwiid.RPT_IR #on active la récupération des info IR
lastUpdate=time.clock()
while(True): #boucle infinie
x=0 #les coordonnée
y=0
s=0 #le nombre de points trouvé
for dot in wm.state['ir_src']: #on récupére les points détécté par la wiimote
print(dot)
if dot != None:
x += dot["pos"][0]
y += dot["pos"][1]
s+=1
if s and (time.clock()-lastUpdate)>=0.001: #si l'on a recu un point
x/=s #on moyenne les coordonée
y/=s
if x <(1.0/3)*WIDTH: #si la coordonée est dans le 1/3 gauche, on diminue l'angle
ser.write("SUB2\n".encode("ascii"))
print("SUB !!!")
elif x >= (2.0/3)*WIDTH:#si on est dans le 1/3 droit on augmente l'angle
ser.write("ADD2\n".encode("ascii"))
print("ADD !!!")
lastUpdate=time.clock()
Ce logiciel à les dépendences suivantes :
* python-cwiid
Installation des dépendences (sous Linux) : sudo apt-get install python-cwiid
Execution ( dans le terminal) : python2.7 main.py
Liens avec d'autres projets arduino
chercher ici : http://wikidebrouillard.org/index.php/Catégorie:Arduino
Pour aller plus loin
Liens avec le quotidien
Ce programme peut, entre autre, être utile pour des conférences.

