Caméra à suivi IR
De Wikidebrouillard.
(→Logiciel) |
(→Liste du matériel) |
||
| Ligne 19 : | Ligne 19 : | ||
* [[Image:DEL.png|50px]] Une [[diode infra-rouge]] comme marqueur | * [[Image:DEL.png|50px]] Une [[diode infra-rouge]] comme marqueur | ||
| - | * Une caméra | + | * [[Image:camera.jpg|50px]] Une [[diode infra-rouge]] une caméra USB |
| + | |||
* Du carton | * Du carton | ||
* Du scotch | * Du scotch | ||
| - | |||
| - | |||
==Réalisation du projet== | ==Réalisation du projet== | ||
Version du 14 janvier 2014 à 13:17
Sommaire |
Présentation du projet Arduino
Objectif : Caméra de conférence, suivant un orateur automatiquement. Une caméra, montée sur un support rotatif motorisé, suit une DEL infra-rouge portée par l'orateur.
Liste du matériel
-
 Un servo-moteur
Un servo-moteur
-
 La carte Arduino Uno
La carte Arduino Uno
-
 Le logiciel Arduino
Le logiciel Arduino
-
 Du fil électrique (noir, rouge…)
Du fil électrique (noir, rouge…)
-
 Un ordinateur pour programmer
Un ordinateur pour programmer
-
 Une diode infra-rouge comme marqueur
Une diode infra-rouge comme marqueur

-
 Une diode infra-rouge une caméra USB
Une diode infra-rouge une caméra USB
- Du carton
- Du scotch
Réalisation du projet
Caméra de conférence, suivant un orateur automatiquement.
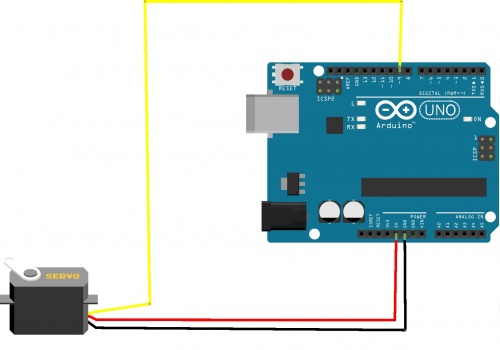
Mécanique
Un capteur infra-rouge et la caméra destinée au film sont montées sur un même axe vertical, posées sur un plateau.
Le plateau peut tourner à l'horizontal, motorisé par un servo-moteur.
Celui-ci est contrôlé par la carte Arduino.
Le Schéma:

Logiciel
L'image du capteur infra-rouge est interprétée sur un PC : Le programme recherche à l'image la diode infra-rouge, et commande le moteur pour la centrer horizontalement.
Le logiciel utilisé peut se télécharger avec ce lien
Code Arduino
#include <Servo.h>
//Permet d'attendre que le servomoteur finisse sont mouvement
#define TEMPS 550
//On créer un objet servo pour controler le servomoteur
Servo myservo;
void setup()
{
//On initialise la liaison série
Serial.begin(9600);
//On attache le pin 9 au servomorteur
myservo.attach(9);
//On met le servomoteur à 90° par défault
reset90();
}
void loop()
{
//Si il y a une connexion série
if(Serial.available())
{
//On recoit la trame
String recu = recevoir();
//On détermine la commande
String commande = recu.substring(0,3);
//On détermine le paramètre
String parametre = recu.substring(3);
//Si la commande est ADD
if(commande == "ADD")
{
//On récupère le paramètre
int par = parametre.toInt();
//On ajoute l'angle passé en paramètre
add(par);
}
//Si la commande est SUB
else if(commande == "SUB")
{
//On récupère le paramètre
int par = parametre.toInt();
//On soustrait l'angle passé en paramètre
sub(par);
}
//Si la commande est SET
else if(commande == "SET")
{
//On récupère le paramètre
int par = parametre.toInt();
//On impose l'angle passé en paramètre
set(par);
}
//Si la commande est GET
else if(commande == "GET")
{
//On envoi l'angle du servo moteur
envoyer(String(getAngle()));
}
}
}
///// Partie Liaison série
//Fonction qui permet de recevoir des string
String recevoir()
{
//On créer la chaine de charactère pour recevoir un message
char test[20];
//On recois le message
int recus = Serial.readBytesUntil('\n', test, 20);
//On convertit le tableau en string et on la retourne
return String(test);
}
//Fonction qui permet d'envoyer des string
void envoyer(String env)
{
//On envoie le message
Serial.println(env);
}
///// Partie commande servoMoteur
// pour avoir la position actuelle
int getAngle()
{
return myservo.read(); // myservo.read() renvoit l'angle du servo.
}
// fonction set
int set(int angle)
{ // qui prend en paramètre d'entrée l'angle, et qui met le servo à cette angle.
myservo.write(angle);
delay(TEMPS / (181 - (angle)));
}
//fonction add
int add(int angle)
{
if((myservo.read()+angle) >= 172)
set(172);// valeur de butée pour ne pas forcer sur le moteur.
else
set(angle+myservo.read());
}
//fonction sub
int sub(int angle)
{
if((myservo.read()-angle) < 0)
set(0); // on fixe l'angle à 0.
else
set(myservo.read()-angle);
}
//fonction reset90
int reset90()
{
set(90);
}
//fonction reset0
int reset0()
{
set(0);
}
//fonction reset180
int reset180()
{
set(180);
}
Code python
#encoding:utf-8
import serial #port serie afin d'envoyer les instructions a l'arduino
import cwiid #libraire pour la wiimote
import time
ser = serial.Serial("/dev/ttyACM0")
WIDTH=1024 #largeur de la camera de la wiimote
WIIMOTE_MAC = "E0:0C:7F:88:99:F9" #code de la wiimote
print("We are now pairing the wii remote, please, presse 1 and 2 button...")
try:
wm = cwiid.Wiimote(WIIMOTE_MAC) #on apaire la wiimote
except RuntimeError: #en cas d'échec un message est affiché
print("Error will pairing wii remote, is blutooth on ?")
quit() #et on quit
else:
print("Pairing succes")
wm.led = 5
wm.rpt_mode = cwiid.RPT_IR #on active la récupération des info IR
lastUpdate=time.clock()
while(True): #boucle infinie
x=0 #les coordonnée
y=0
s=0 #le nombre de points trouvé
for dot in wm.state['ir_src']: #on récupére les points détécté par la wiimote
print(dot)
if dot != None:
x += dot["pos"][0]
y += dot["pos"][1]
s+=1
if s and (time.clock()-lastUpdate)>=0.001: #si l'on a recu un point
x/=s #on moyenne les coordonée
y/=s
if x <(1.0/3)*WIDTH: #si la coordonée est dans le 1/3 gauche, on diminue l'angle
ser.write("SUB2\n".encode("ascii"))
print("SUB !!!")
elif x >= (2.0/3)*WIDTH:#si on est dans le 1/3 droit on augmente l'angle
ser.write("ADD2\n".encode("ascii"))
print("ADD !!!")
lastUpdate=time.clock()
Ce logiciel à les dépendences suivantes :
* python-cwiid
Installation des dépendences (sous Linux) : sudo apt-get install python-cwiid
Execution ( dans le terminal) : python2.7 main.py
Liens avec d'autres projets arduino
chercher ici : http://wikidebrouillard.org/index.php/Catégorie:Arduino
Pour aller plus loin
Liens avec le quotidien
Ce programme peut, entre autre, être utile pour des conférences.

